
Dnipro University of Technology — Compliance with the Time
|
|
Crafting dynamic model of the control plantHere, the dynamic model of the membrane compressor is explained.
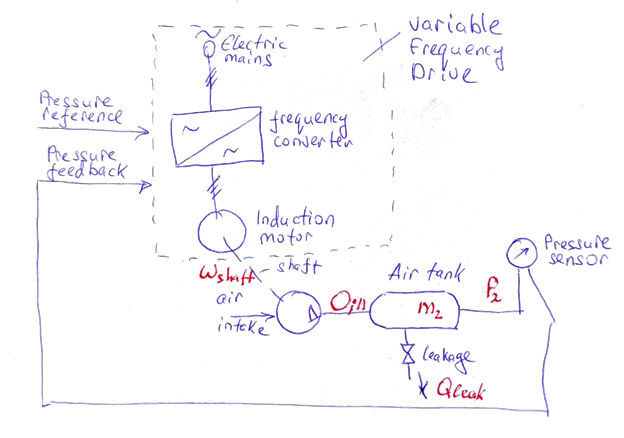
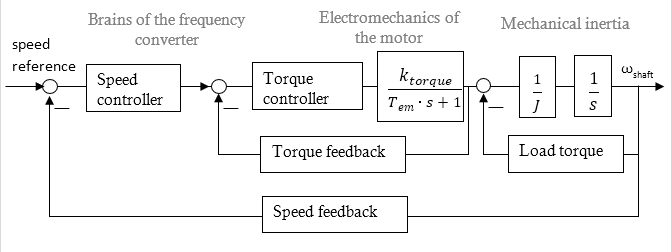
Why do we need this?Diagrams are engineer’s best friends. It is physically impossible for humans to analyze complex interconnected systems using only textual description. Besides, the aim of our work is to understand the structure of the control plant and properly tune the PID controller for it. To do that, it is necessary to define at least the order and character of the control plant. The functional diagramThe figure below is called a ‘Functional diagram’.
The functional diagram is a mixture of everything: it can contain symbols of mechanical elements, electric wires, signals like reference and feedback. When designing or analyzing any system, using functional diagrams is usually the first and easiest way to understand the structure of the system. The following table describes the variables.
The structural model of compressor and the air tankThe relation between the pressure in the tank is described by the equation of the ideal gas \[P_2 \cdot V_2 = \frac{m_2}{M_{air}}\cdot R \cdot T_2\]
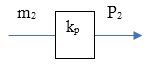
V2 is its volume; m2 is the mass of the air in the tank; M2 is the molar mass of the air; R=8.314 is the molar gas constant (also known as the gas constant, universal gas constant, or ideal gas constant); T2 is the absolute temperature [K] of the air in the tank. The equation is given only to illustrate the dependency of pressure and mass. None of these variable except P2 we shall use in calculations, thus we don’t need their values. Considering that all other variables in this equation are constant, we can assume that the pressure is proportional to the mass of the air: \[P_2 = k_p \cdot m-2\]where kp is a pressure coefficient. Thus, this element is represented by a simple gain
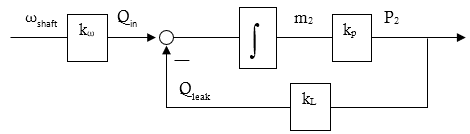
The mass m2 of the air currently present in the reservoir is an integral of the mass flow. The latter is the difference between the intake Qin and leakage Qleak mass flow rates: \[m_2 = \int{(Q_{in}-Q_{leak})\cdot dt}\]We assume that the leakage is proportional to the pressure in the tank, the bigger the pressure – the fast the air leaks out \[Q_{leak} = k_L \cdot P_2\]Finally, the air intake Qin depends on the number of reciprocating cycles per minute. The more frequent membrane ‘exhales’ are, the more air supplies the compressor. In other words, we simply assume that Qin is proportional to the motor rotation speed \[ Q_{in}=k_{\omega}\cdot \omega\]The structural diagram is shown in the figure below.
Integration in Laplace transform is represented as \(\frac{1}{2}\). Hereinafter we are use this designation. Thus, the total transfer function of this part of the control plant will be \[W(s)=\frac{P_2}{\omega_{shaft}}=\frac{k_\omega}{T_{compressor} \cdot s + 1}\]where \(T_{compressor}=\frac{1}{k_P \cdot k_L}\) – relatively big compressor’s time constant. It is so-called aperiodic, or inertial element.
Note that the control plant is not only compressor, but all the part of the system between PID-controller and pressure sensor.
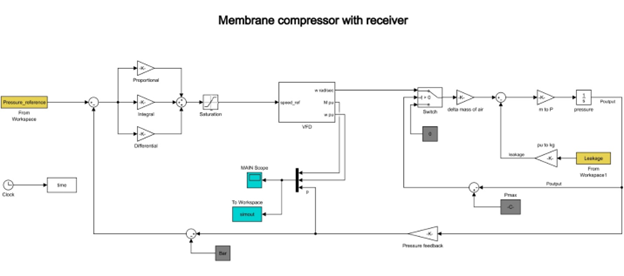
The full model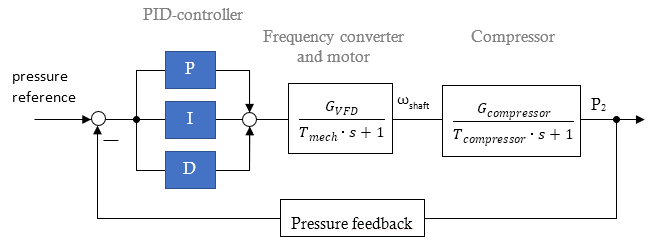
AssumptionsUnderstanding assumptions is more important than it might seem. Often it means the difference between whether or not the equipment will work. Any model is idealistic. Models never represent all the physical phenomena in the control plants. Our model has the following assumptions and deviations of the idealistic case
|
© 2006-2026
Інформація про сайт