ЛАБОРАТОРІЯ МЕХАТРОНІКИ ТА РОБОТОТЕХНІКИ
Interpipe Mechatronic Lab1
Лабораторію створено у травні 2019 р. за сприяння компанії Інтерпайп.
У вересні 2020 р. компанією Fischertechnik лабораторії надано статус «Авторизований центр мехатроніки та робототехніки Fischertechnik в Україні».
Мехатроніка — технічна професія майбутнього, суть якої в управлінні, обслуговуванні й ремонті промислових роботів і сучасного автоматизованого обладнання.
Лабораторія оснащена діючими макетами технологічного обладнання німецької компанії Fischertechnik: конвеєрами, автоматизованими складами, лініями сортування за кольором, лініями металообробки, роботами тощо. Макети мають у своєму складі електричні двигуни, різноманітні давачі, контролери, компресори.
Лабораторія призначена для підготовки інженерів спеціальності 141 «Електроенергетика, електротехніка та електромеханіка» (професійне спрямування «Електропривод, мехатроніка та робототехніка»), а також для просування знань з мехатроніки та робототехніки серед старшокласників шкіл області.
Лабораторія є базою для освітньо-тренувальної програми з мехатроніки Interpipe Mechatronic Lab для учнів старших класів Дніпра та області. Тут проводяться майстер-класи, літні та зимові школи для школярів та викладачів шкіл.
КонвеєрЛінія сортування за кольоромАвтоматизований склад із 3D-роботомЛінія пресування із конвеєромМультипроцесорна станція з роботом3D-робот із вакуумним захватом3D-робот із механічним захватомФабрикаПрограмований контролер
Керування макетами здійснюється від програмованого контролера ROBOTICS TXT, що програмується в середовищі ROBO Pro або мовами С, С++, С# и VB. Контролер працює під керуванням ОС Linux. Оснащений кольоровим сенсорним дисплеєм 2,4 дюйма. Головний процесор ARM Cortex A8 (два ядра, 32 біт, 600 МГц), периферійний — Cortex M3. Універсальні входи: 8 штук (цифрові/аналогові 0-9 В або 0-5 кОм). Лічильні входи: 4 штуки. Підключення до ПК: USB/mini-USB.
Навчальна модель в комплекті з контролером ROBO TX. Довжина транспортера 275 мм. Діаметр переміщуваних деталей до 29 мм.
Комплект:
Контролер ROBO TX.
1 двигун постійного струму 9 В.
1 мікроперемикач, який можна використовувати як енкодер для визначення положення деталей на стрічці конвеєра або як просту кнопку.
2 світлових бар'єру. Кожен бар'єр складається з однієї лампи розжарювання і фототранзистор.
1 деталь для транспортування. Діаметр 29 мм. Висота 25 мм.
Габаритні розміри: 275 x 210 x 70 мм (ГxШxВ).
Лінія сортування за кольором ⮯
Сортувальний конвеєр використовується для сортування деталей за кольором. Деталі надходять на вхід конвеєра. Потім вони проходять через датчик кольору і по команді контролера стикаються в один з трьох накопичувачів в залежності від кольору поверхні.
Комплект:
Малопотужний мотор-редуктор: 1 шт.
Фототранзистор: 5 шт.
Джерела світла: 5 шт.
Електромагнітний пневматичний клапан: 3 шт.
Компресор
Фотоелектричний датчик кольору
Програмований контролер ROBOTICS TXT: 1 шт.
Імітаційні вантажі для транспортування: 3 шт.
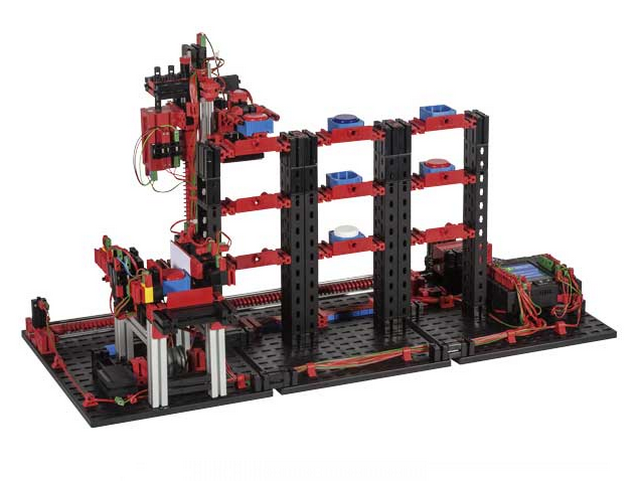
Автоматизований склад із 3D-роботом ⮯
Макет автоматичного вертикального складу складається зі стелажної конструкції на 9 осередків, уздовж якої переміщається кран-штабелер з завантажувальним пристроєм. Подача транспортних контейнерів здійснюється за допомогою стрічкового транспортера через станцію завантаження / розвантаження.
Комплект:
Мотор-редуктор з вбудованим енкодером: 2 шт.
Малопотужний мотор-редуктор: 2 шт.
Кінцевий вимикач (кнопка): 4 шт.
Фототранзистор: 2 шт.
Джерела світла: 2 шт.
Транспортні контейнери
Різнобарвні імітаційні вантажі для транспортування і зберігання: 3 шт.
Програмований контролер ROBOTICS TXT: 1 шт.
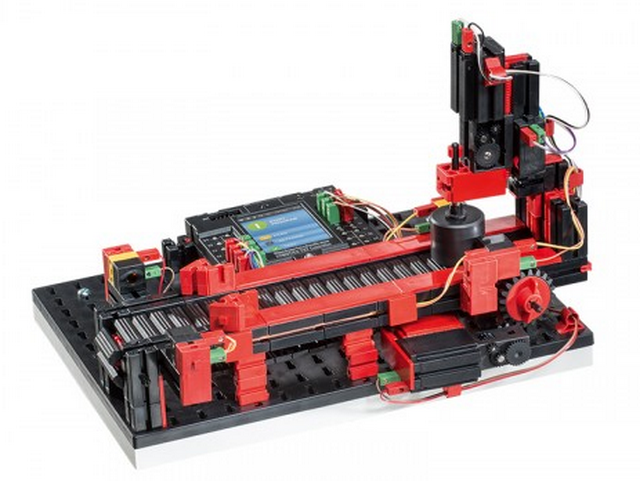
Лінія пресування із конвеєром ⮯
Макет призначений для вивчення технологій промислової автоматизації.
Макет складається з стрічкового транспортера і штампувального преса. Для визначення положення заготівок на стрічці транспортера використовуються два фотоелектричних датчика. Один датчик розташований у вхідній зоні транспортера, а другий на позиції обробки.
Привод штампувальний преса переміщує штамп уздовж вертикальної осі. Кінцеві положення штампа фіксуються двома кінцевими вимикачами.
Макет можна легко об'єднати з трьох-осьовим маніпулятором.
Комплект:
2 двигуна постійного струму 9 В.
2 мікроперемикача.
2 світлових бар'єру. Кожен бар'єр складається з одного світлодіода і фототранзистор.
1 імітація оброблюваної деталі. Діаметр 29 мм. Висота 25 мм.
Габаритні розміри: 275 x 210 x 200 мм (ГxШxВ)
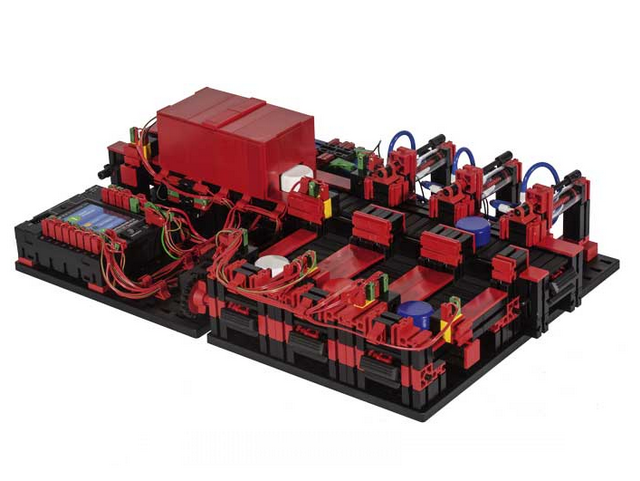
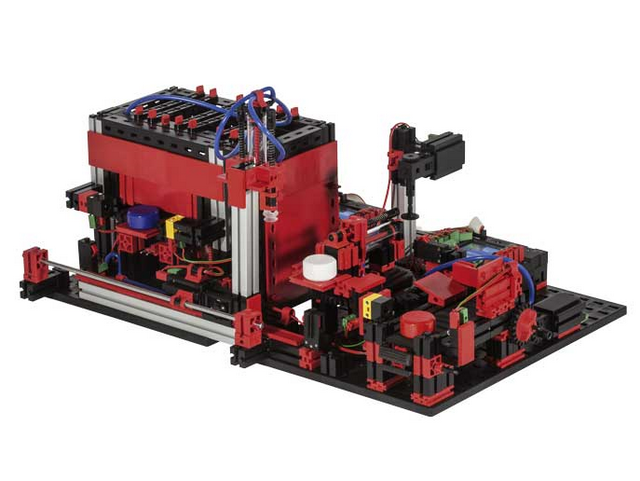
Мультипроцесорна станція з роботом ⮯
Технологічна ділянка термічної обробки складається з нагрівальної печі, обладнаної розсувними дверима, і ділянки механічної обробки. Піч пов'язана з ділянкою механічної обробки за допомогою передавального пристрою з вакуумним захопленням. Ділянка механічної обробки обладнана поворотним столом і відрізним ножем. Він пов'язаний із суміжною виробничою лінією за допомогою стрічкового транспортера.
Комплект:
Малопотужний мотор-редуктор: 4 шт.
Кінцевий вимикач (кнопка): 6 шт.
Фототранзистор: 2 шт.
Джерела світла: 2 шт.
Електромагнітний пневматичний клапан: 4 шт.
Компресор
Програмований контролер ROBOTICS TXT: 1 шт.
Імітаційні вантажі для транспортування: 3 шт.
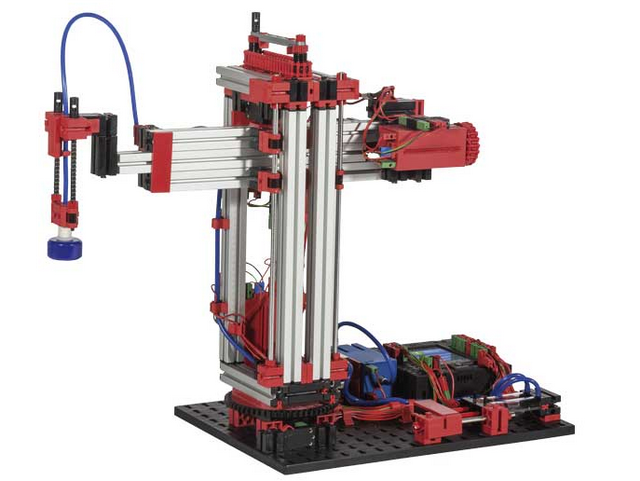
3D-робот із вакуумним захватом ⮯
Маніпуляторний робот з трьома ступенями руху, оснащений вакуумним пристроєм захоплення, використовується для переміщення різних об'єктів в робочій зоні, обмеженій наступними розмірами:
Вісь обертання Х: 280 град
Ось лінійного переміщення Y (вперед / назад): 140 мм
Ось лінійного переміщення Z (вгору / вниз): 120 мм
Комплект:
Мотор-редуктор з вбудованим енкодером: 3 шт.
Кінцевий вимикач (кнопка): 3 шт.
Вакуумний насос: 1 шт.
Компресор: 1 шт.
Електромагнітний пневматичний клапан: 1 шт.
Програмований контролер ROBOTICS TXT: 1 шт.
Імітаційні вантажі для транспортування: 1 шт.
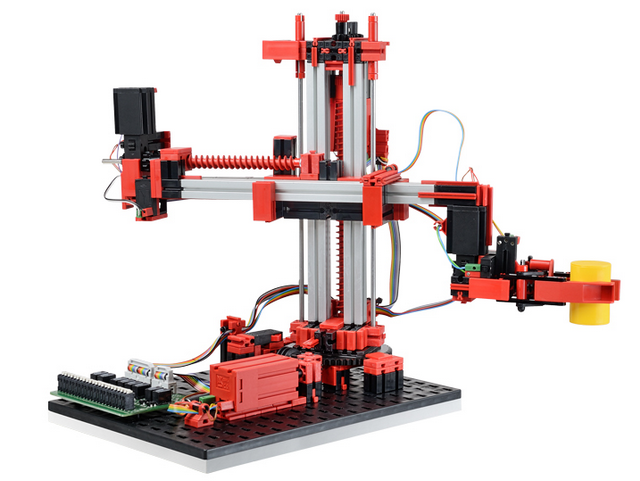
3D-робот із механічним захватом ⮯
Робочий макет промислового 3-D маніпулятора в зборі з загарбним пристроєм, чотирма моторами 9 В, контактними датчиками і контролером.
Модель призначена для захоплення і переміщення заготовок між виробничими ділянками. Захоплення наступної заготовки здійснюється після повернення маніпулятора в початкове положення.
Ступені рухливості:
Ось 1: Поворот 180°
Ось 2: Поступальний переміщення 100 мм
Ось 3: Поступальний переміщення 160 мм
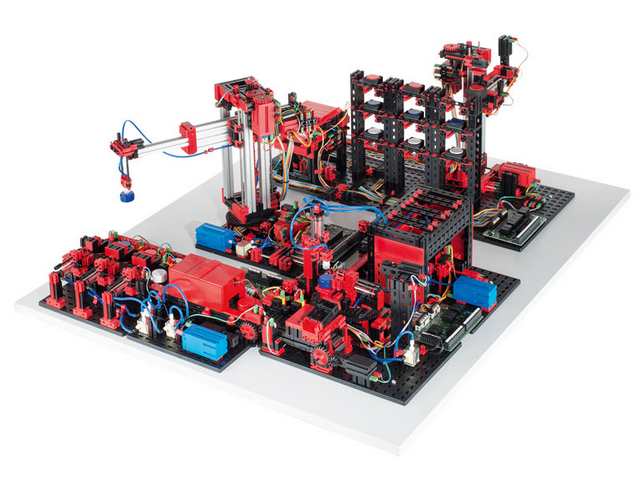
Фабрика ⮯
Комплексний макет виробництва складається з моделей:
Сортувальний конвеєр з датчиком кольору
Технологічний ділянку з піччю
Автоматичний вертикальний склад
Маніпулятор з вакуумним пристроєм захоплення
Макет виробництва складається з чотирьох ділянок. Імітація роботи виконується в замкнутому циклі: вироби витягуються з вертикального складу, обробляються на ділянці з нагрівальної піччю, потім сортуються на сортувальному конвеєрі і після цього поміщаються на зберігання в вертикальний склад.
До складу макета входять імітаційні вантажі для транспортування в кількості 9 шт.
Вимоги до системи управління:
Цифрові входи — 27 шт
Цифрові виходи — 35 шт
Рахункові входи — 4 шт
Аналогові входи — 1 шт
Тип роз'єму для підключення: IDC34-M — 4 шт.
Тип роз'єму для підключення: пружинні клеми
Для роботи потрібен програмований контролер ПЛК
Програмований контролер ⮯
Контролер від FISCHERTECHNIK — ROBOTICS TXT має невеликі розміри: дисплей контролера діагоналлю 2,4 дюйма (6 см) і роздільною здатністю 320х240 пікселів.
Дисплей кольоровий і сенсорний, що робить роботу з ним більш приємною. Контролер підтримує технології Bluetooth і Wi-Fi, завдяки чому може обмінюватися інформацією на відстані. Також, у нього є ІЧ-приймач для дистанційного керування.
Контролер має вісім портів для підключення моторів, світлодіодів та інших виконавчих пристроїв і вісім портів для підключення різних датчиків. Таким чином, одноразово можна використовувати 16 різних електронних компонентів, що досить багато.
До контролера ROBOTICS TXT можна підключати додаткові датчики і виконавчі пристрої: сервомотори, мотор XS, перемикачі, терморезистори, фотодатчики і світлодіоди. Контролер має вбудований динамік.
Технічні характеристики контролера ROBOTICS TXT:
головний процесор ARM Cortex A8: два ядра, 32 біт, 600 МГц;
ІЧ фотоприймач для пульта управління з комплекту «Набір для дистанційного керування»;
USB роз'єм mini-USB для підключення до ПК;
USB роз'єм USB-A з функцією хост-контролера для підключення USB-камери, USB-флеш накопичувача і інших девайсів;
підключення відеокамери через інтерфейс USB, драйвер для ОС Linux;
роз'єм 10 пін для підключення модулів розширення з інтерфейсом I2C;
вбудований динамік;
вбудований годинник реального часу зі змінною батареєю для вимірювань через задані проміжки часу;
підключення до смартфонів / планшетів через Bluetooth або WiFi дозволяє використовувати їх як термінал для контролера;
живлення: від акумулятора через стандартні штекери Fischertechnik 2.5 мм або від блоку живлення 9В через циліндричний роз'єм 3.45 мм;
розміри: 90х90х25 мм.
Контролер працює під управлінням операційної системи Linux.
Інтерфейс USB з функцією хост-контролера дозволяє підключати різні пристрої USB: відеокамери, флеш-накопичувачі. Роз'єм MicroSD дозволяє підключити додаткову зовнішню пам'ять. Кілька контролерів можуть бути об'єднані між собою. Це дозволяє збільшити кількість входів і виходів.
Програмувати контролер можна не тільки в середовищі візуального програмування ROBO Pro, але і використовуючи текстові мови: С, С++, С#.





 Конвеєр
Конвеєр
 Лінія сортування за кольором
Лінія сортування за кольором
 Автоматизований склад із 3D-роботом
Автоматизований склад із 3D-роботом
 Лінія пресування із конвеєром
Лінія пресування із конвеєром
 Мультипроцесорна станція з роботом
Мультипроцесорна станція з роботом
 3D-робот із вакуумним захватом
3D-робот із вакуумним захватом
 3D-робот із механічним захватом
3D-робот із механічним захватом
 Фабрика
Фабрика
 Програмований контролер
Програмований контролер