
Що таке мехатроніка
До складу будь-якої машини входять механічна частина, приводна (переважно електромеханічна) частина, а також система керування. Елементами механічної частини є:
- робочий орган (лебідка крана, робоче колесо насосу, фреза металорізального верстату), що виконує корисну механічну роботу (переміщення вантажу, механічна обробка деталі тощо);
- механічна передача, яка змінює швидкість руху або його характер (поступальний замість обертального).
Завданням приводної частини (електроприводу) є перетворення електричної енергії на механічну та приведення до руху робочих органів машини. Електромеханічна приводна частина складається з електричного двигуна та електронного силового перетворювача, який перетворює електроенергію, спожиту з джерела (системи електропостачання) до вигляду, придатного для живлення обмоток двигуна. Саме через цей перетворювач і здійснюється керування швидкістю, зусиллями та положенням валу двигуна та, зрештою, робочого органу.
Останнім часом у побудові машин нового покоління спостерігається тенденція передачі все більшої кількості функцій від механічних вузлів до інтелектуальних (електронних, комп’ютерних, інформаційних), із яких складається система керування машиною. Інтелектуальні вузли легко перепрограмовуються під нове завдання, що розширює функціональні можливості машини. Водночас із розвитком техніки вузли машини різної фізичної природи (механічні, електричні, електромеханічні, електронні, інформаційні) поступово об’єднувалися в єдине конструктивне ціле. Саме такі інтелектуальні машини та вузли називають мехатронними. Мехатроніка (Mechatronics) – галузь науки та техніки, присвячена створенню та експлуатації машин із комп’ютерним керуванням рухом, яка базується на знаннях у царині електромеханіки, електроніки, мікропроцесорної техніки, автоматики та ІТ-технологій.
 |
Термін «мехатроніка» з’явився наприкінці 60-х років минулого століття в Японії. Він є комбінацією слів «МЕХАніка» та «елекТРОНІКА». Місце мехатроніки серед суміжних галузей знань показане на рис. 1. Як видно, вона вбирає в себе досягнення не лише механіки та електроніки, а й сучасних цифрових систем керування та автоматизованого проектування (CAD). У зовнішньому колі показані основні сфери застосування мехатроніки.
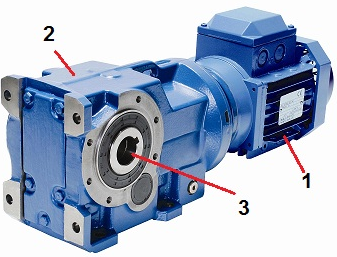
Ключовим елементом мехатронних систем є мехатронний модуль руху. Одним із найперших таких модулів став свого часу мотор-редуктор (рис. 2), що поєднав у собі приводний електричний двигун та індустріальний механічний редуктор. Його використання значно спростило розробку та виготовлення машини, її надійність.
 |
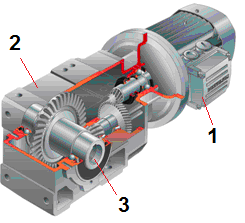 |
(1 – електричний двигун; 2 – редуктор; 3 – вихідний вал редуктора) |
|
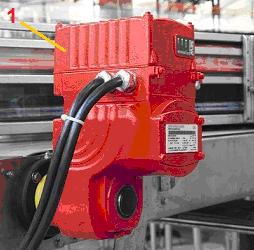
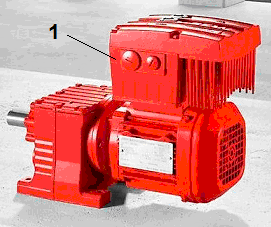
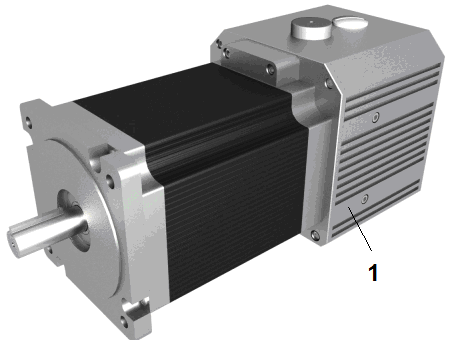
Подальша мініатюризація засобів силової та керуючої електроніки дала змогу конструктивно об’єднати з електромеханічними вузлами ще й електронні. З’явилися інтелектуальні мехатронні модулі (ІММ) у вигляді двигунів та мотор-редукторів з силовими перетворювачами (перетворювачами частоти) на борту (рис. 3). Подібні пристрої завдяки наявності в їх складі обчислювальних пристроїв здатні автономно виконувати переміщення робочих органів машин без постійного контролю з боку системи автоматизації верхнього рівня.
 |
 |
 |
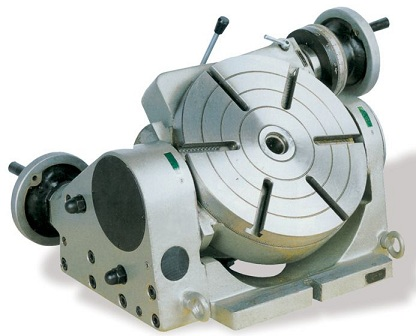
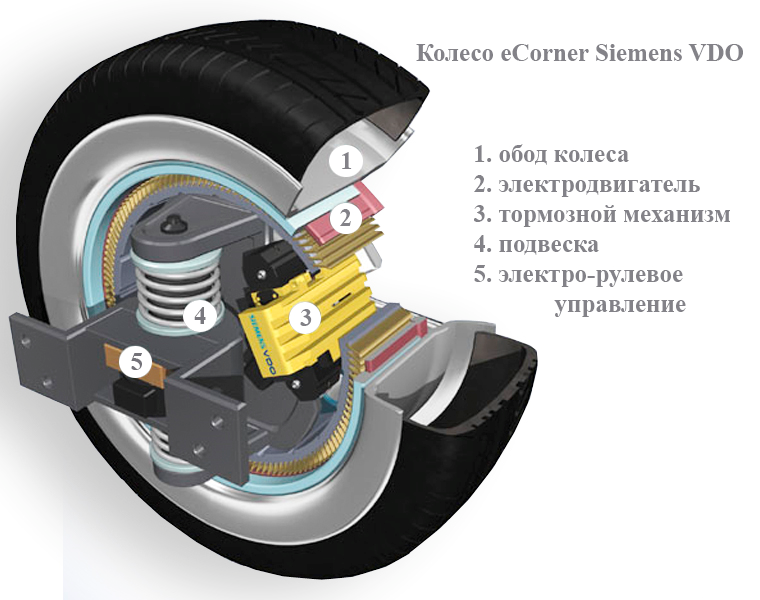
Для потреб машинобудування (насамперед для верстатів з числовим програмним керуванням та промислових роботів) розроблені мехатронні модулі, які поєднують у собі не лише електромеханічні вузли, а й сам робочий орган машини:
- електрошпиндель (електродвигун + шпиндельний вузол для закріплення ріжучого інструменту, рис. 4,а);
- поворотний стіл для закріплення оброблюваної деталі (рис. 4,б);
- мотор-колесо (поєднання двигуна та колеса транспортного засобу, рис. 4,в) тощо.
 а) |
 б) |
 в) |
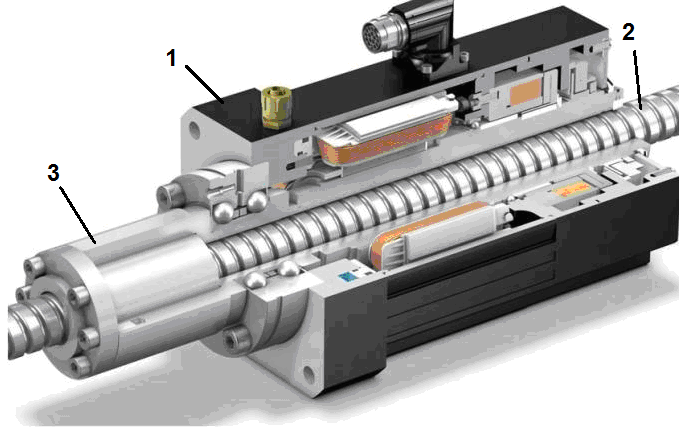
Велика кількість механізмів має поступальний рух робочого органу (механізми подач верстатів, деякі промислові роботи тощо). Для них розроблені мехатронні модулі поступального руху. На рис. 5,а показаний розтин електроциліндра, що складається з електродвигуна 1, гвинта 2 (одночасно є ротором двигуна) та нерухомої гайки 3. Два останні утворюють кулько-гвинтову передачу, в якій обертання гвинта призводить до його поступального руху. На рис. 5,б показано електроциліндр у зборі.
 а) |
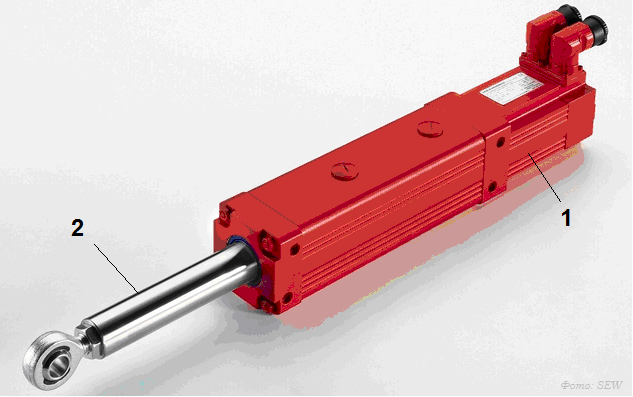 б) |
Тієї ж самої мети можна досягти за допомогою т. зв. «лінійних осей». На рис. 6,а зображено комплектний модуль, до складу якого входить серводвигун 1 із перетворювачем частоти та електромагнітним гальмом, гвинт 2 та супорт із гайкою 3. Обертання валу двигуна та гвинта призводить до поступального переміщення супорту. На рис. 6,б можна бачити мехатронний лінійний модуль, що забезпечує рух уздовж трьох осей.
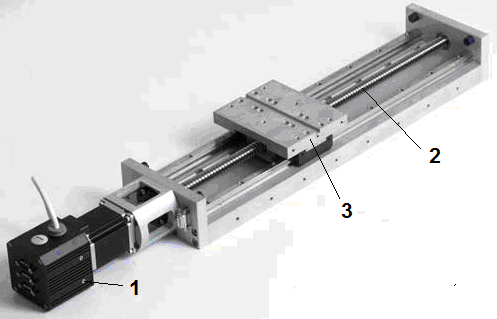 а) |
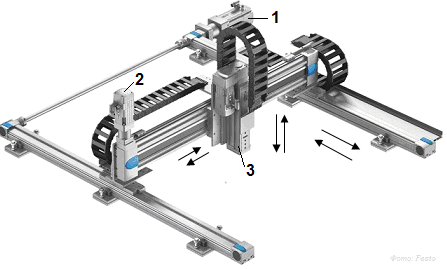 б) |
(а – однокоординатна; б – трикоординатна) |
|
Значного спрощення механічної частини можна домогтися шляхом використання лінійних двигунів замість звичайних двигунів обертального руху (рис. 7). Лінійний двигун не має обертальних частин. Його рухома частина (1 на рис. 7) має обмотку, яка створює магнітне поле. Це поле відштовхується від нерухомої частини (2) з постійними магнітами, яка виконує роль напрямних, та забезпечує поступальне переміщення рухомої частини.
 |
із лінійним двигуном |
Основні переваги використання інтелектуальних мехатронних модулів:
- здатність ІММ виконувати складні рухи самостійно, без звернення до контролера верхнього рівня керування, що підвищує автономність модулів, гнучкість та живучість мехатронних систем;
- спрощення комунікації між модулями та центральним пристроєм керування (аж до переходу до бездротових комунікацій);
- підвищення надійності та безпеки мехатронних систем завдяки комп’ютерному діагностуванню несправностей та автоматичному захисту в аварійних ситуаціях;
- створення на основі ІММ розподілених систем автоматизації, для яких характерне делегування повноважень «зверху» до «низу» (тобто перехід від «монархії» до «демократії»), широке використання мережних технологій обміну інформацією;
- використання інтелектуальних сенсорів в ІММ призводить до підвищення точності вимірювань завдяки первинній обробці інформації, фільтрації шумів тощо.
Для реалізації точних рухів мехатронний модуль комплектується давачем положення (енкодером, рис. 8). Електропривод, обладнаний таким давачем, називають сервоприводом. До складу систем керування рухом, що поєднують кілька сервоприводів (ІММ), входять контролери керування рухом (сервоконтролери, рис. 9). До основних функцій сервоконтролерів належать координація рухів окремих сервоприводів (мехатронних модулів) та формування для них завдань на переміщення з метою реалізації складних просторових траєкторій руху.
 Рис. 8 Енкодери |
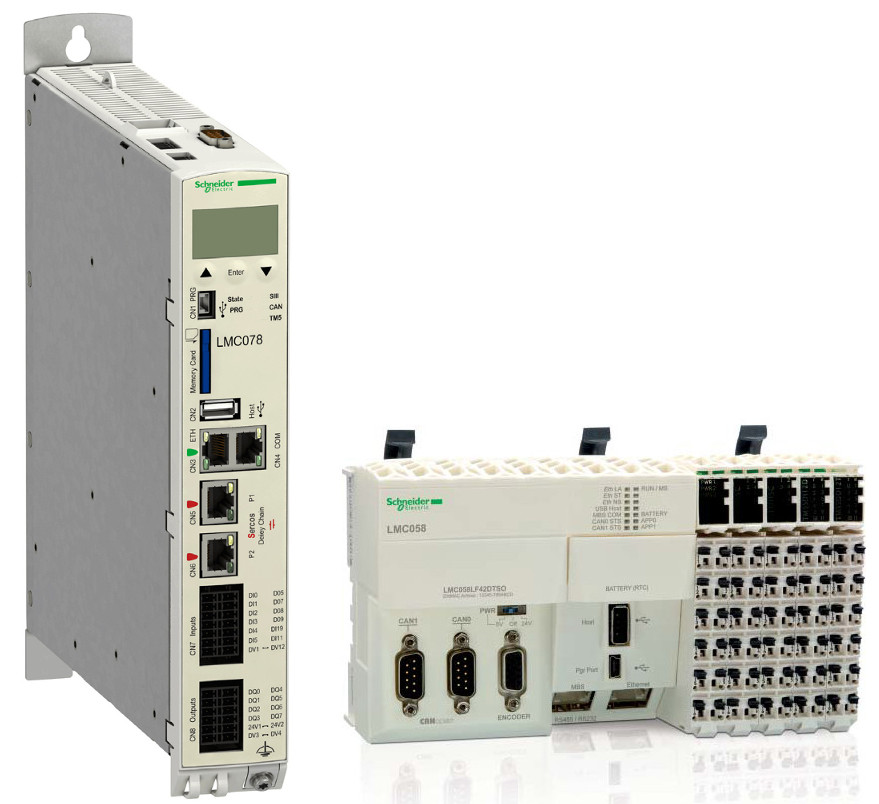 Рис. 9 Сервоконтролери |
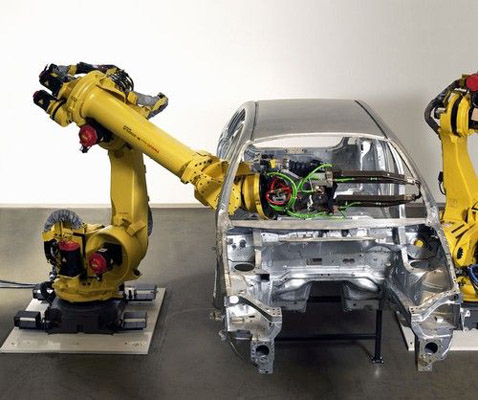
Яскравим прикладом мехатронної системи є роботи та маніпулятори (рис. 10). Вони все частіше використовуються для зварювальних та фарбувальних робіт, збиральних операцій, виготовлення електронних друкованих плат, металообробки, у космічних дослідженнях і навіть у побуті.
 а) |
 б) |
 |
Деякі різновиди роботів (у тому числі показані на рис. 10) чимось подібні до людської руки як за конструкцією, так і за призначенням. Завданням інших є автоматичне переміщення вантажів цехом, тому вони виглядають, як візки (рис. 11).
Типовою мехатронною системою є верстат із числовим програмним керуванням (ЧПК), який використовують для механічної обробки виробів з металу, деревини, пластмас (рис. 12). Роботу модулів руху (осей) координує цифрова система ЧПК, до якої попередньо завантажено програму обробки.
 а) |
 б) |
Сьогодні мехатронні модулі й системи знаходять широке застосування також у наступних областях:
- автомобілебудування (наприклад, антиблокувальні системи гальм, системи стабілізації руху автомобіля й автоматичного паркування, автопілоти);
- 3D-принтери (рис. 13);
- нетрадиційні транспортні засоби (електровелосипеди, сегвеї, інвалідні візки, дрони, рис. 14);
- офісна техніка (наприклад, копіювальні й факсимільні апарати);
- елементи обчислювальної техніки (наприклад, принтери, плотери, дисководи);
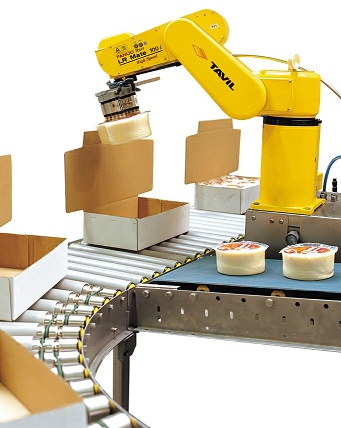
- технологічні лінії та пакувальні машини харчової і обробної промисловості;
- поліграфічні машини;
- побутова техніка (пральні, швейні, посудомийні та інші машини);
- фото- і відеотехніка;
- медичне обладнання (реабілітаційне, клінічне, сервісне);
- тренажери для підготовки пілотів й операторів та ін.
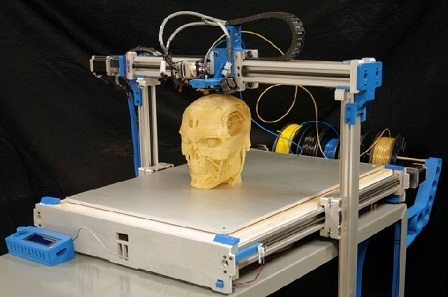 Рис. 13 3D-принтер |
 Рис. 14 Дрон |
Цифрові системи керування мехатронними системами залежно від ступеню складності та традицій певної галузі можуть бути реалізованими у вигляді:
- мікроконтролерів;
- сервоконтролерів;
- програмованих логічних контролерів (ПЛК);
- систем ЧПК (для роботів та верстатів);
- промислових комп’ютерів тощо.
Мехатронні системи, як і системи електроприводу, належать до електромеханічних систем. Проте до відмінностей мехатронних систем слід віднести:
- відносно малу потужність (оскільки поєднання в одному конструктивному модулі механічних, електричних та електронних підсистем за великої їх потужності реалізувати неможливо);
- виключно цифрову природу систем керування (в електропривод можливі і аналоговий принцип побудови);
- переважно більшу точність та швидкодію.